

LoRa無線水表采用磁阻傳感技術,具備高精度的水量采集性能、正反轉采集能力與磁干擾報警能力,保證水表數據的準確性和可靠性。同時表計還提供內置電池電壓和表計溫度信息的上傳,便于監測表計的工作情況。
表計采用超低功耗的軟硬件設計,靠其內置的大容量、高性能一次鋰亞電池,足夠保證表計工作9年以上。
通過智能時隙分配與擴頻通信技術,有效消除了表計間的無線串擾與外界同頻干擾,保證了表計與LoRa遠傳網關通信的高可靠性。表計設計所采用的高性能無線通信收發器芯片,具備高達17dBm的發射功率與125kHZ帶寬下高達-125dBm的靈敏度,有效保證表計通信距離,也大大的增強表計信號穿墻能力。
表計具備NFC功能,通過帶有NFC功能的手機和專用的APP即可進行表計信息配置、讀取,便于安裝維護。
LoRa無線大表遠傳RTU是由LoRa無線大表監測終端和LoRa遠傳網關組成的大表遠傳設備。
LoRa無線大表監測終端具備高精度的水量采集性能、正反轉采集能力與磁干擾報警能力,保障水表數據的準確性和可靠性。同時終端還提供內置電池電壓和溫度信息的上傳,便于工作人員對監測終端的狀態維護。
監測終端采用超低功耗的軟硬件設計,靠其內置的大容量、高性能一次鋰亞電池,足以保證終端不間斷工作6年以上。
監測終端主體采用聚四氟乙烯外殼設計,具備IP68防塵防水等級,可適應各種惡劣的安裝環境。
監測終端通過無線擴頻通信技術與LoRa遠傳網關傳遞信息,再由網關將數據通過蜂窩網絡上傳到大表后臺,全程無線通信,避免了傳統大表遠傳設備在采集器和遠傳設備間常需要遠距離布線的困擾,大大降低了設備的安裝難度與安裝成本。
監測終端和網關都具備NFC功能,通過帶有NFC功能的手機和專用的APP即可進行信息配置、讀取,便于安裝和維護。
目前許多地方的自來水公司,還是采用人工上門讀取水表數據的抄表方式,這種方式需要抄表工人挨家挨戶去讀取水表的數字,如果用戶家中無人就沒辦法讀取數據,而且人工抄表的方式還非常不利于數據統計,隨著現在科學技術的發展,對抄表方式也是提出了新的要求,要求提高可靠性,實時性以及數據處理的方便性。于是無線抄表技術已經開始廣泛應用于自來水公司的自動抄表。由于長距窒內外的布線存在著短路、斷線隱患,錯綜復雜的線路使系統調試和維護困難重重,現在存在的遠程集中抄表方式已不能滿足水電公司日益增長的業務需求。因此,我們提出了新的自動抄表系統---無線抄表。
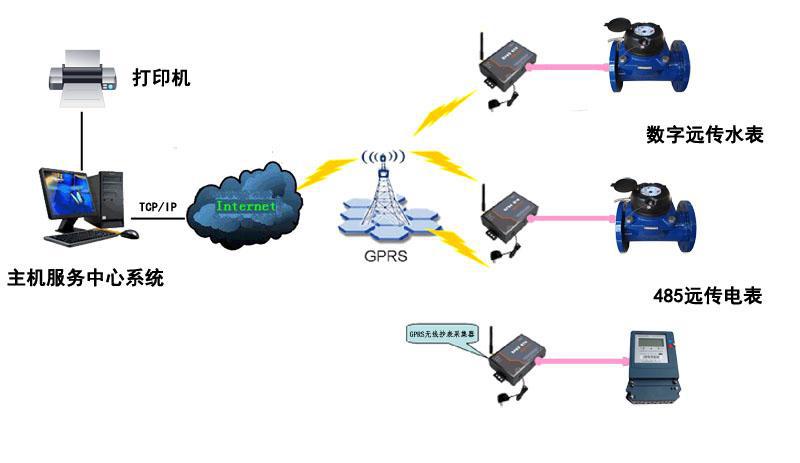
無線遠傳水表、采集器、樓宇主機、集中器、遠程通訊模塊和上位機管理軟件組成。無線遠傳水表根據需要發送水量數據和水表工作信息,采集器采集并傳送給樓宇主機,樓宇主機存儲數據;樓宇主機用無線形式將表數據自動傳到集中器,集中器通過GSM/GPRS或者電話Modem等方式,接受來自中心計算機的命令,將集中器中存儲的各表數據和運行情況傳遞到中心計算機,中心根據采集到的數據進行收費和管理。該方案自動化程度高,可以隨時監控表的運行及用量情況,一個管理計算機可以管理多個集中器,適用范圍廣,比較適合電業部門大面積使用。
【系統功能】
1.抄讀功能:按設定抄收間隔以及抄表周期自動抄收集中器的各用戶水表的累計用水量及其他信息,并具有實時隨機招讀及按地址選抄功能。
2.設置功能:可設置設備初始參數,即可對集中器設置自動抄表周期、抄收間隔等,也可對水表的各種參數進行設置。
3.校時功能:可實現系統校時和系統對集中器的校時,系統時鐘全網同步,可有效避免抄表數據混亂。
4.自診斷,分析功能:可提示可能有故障或竊水嫌疑的用戶;以及用水量異常報警。
5.數據安全保障功能:通過指令或密碼實現用戶管理、系統管理,并進行權限設置;防止非受權人員操作。
6.擴展功能:可發布凍結或開啟命令,實現指定時間內水閥的關閉或打開功能。
7.數據處理功能:包括各用戶水表數據的統計,報表生成等。
8.數據存儲功能:結合數據庫管理可實現對抄收回來的數據進行有效存儲,且存儲時間久,可防止管理部門與用戶之間可能產生的糾紛。
LoRa的優勢主要體現在以下幾個方面:
1---大大的改善了接收的靈敏度,降低了功耗
高達157db的鏈路預算使其通信距離可達15公里(與環境有關)。其接收電流僅10mA,睡眠電流200nA,這大大延遲了電池的使用壽命。
2---基于該技術的網關/集中器支持多信道多數據速率的并行處理,系統容量大。
網關是節點與IP網絡之間的橋梁(通過2G/3G/4G或者Ethernet)。每個網關每天可以處理500萬次各節點之間的通信(假設每次發送10Bytes,網絡占用率10%)。如果把網關安裝在現有移動通信基站的位置,發射功率20dBm(100mW),那么在建筑密集的城市環境可以覆蓋2公里左右,而在密度較低的郊區,覆蓋范圍可達10公里。
3---基于終端和集中器/網關的系統可以支持測距和定位。
LoRa對距離的測量是基于信號的空中傳輸時間而非傳統的RSSI(Received Signal Sterngth Ind-ication),而定位則基于多點(網關)對一點(節點)的空中傳輸時間差的測量。其定位精度可達5m(假設10km的范圍)。